前言
因为工作原因,接触到了SLAM算法。一开始只是知道了有这么个词儿,慢慢的才试着去了解SLAM算法的含义。好记性不如烂笔头,更何况我现在没有好记性。
什么是SLAM算法
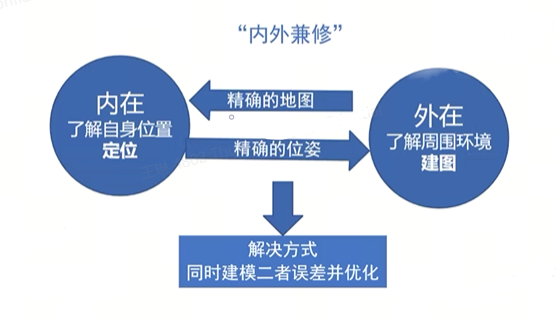
SLAM的全拼为Simultaneous Localization And Mapping,中文一般译为同步定位与地图构建。从名字可以看出,SLAM算法的核心有两点:
- 定位
- 建图
定位即获取自己当前所在空间环境中的位置,建图即将看到或感知到的环境记录下来,构建成环境地图。
因此,SLAM算法的目标可以总结为:在没有任何先验知识的情况下,根据传感器数据实时构建周围的地图环境,同时根据这个地图推测自身的定位。
SLAM算法的工作内容,可以形象的描述为:
当我们进入一个未知的环境时,
- 特征标记:用”眼睛“观察周围地标,并记住他们的特征。
- 在自己的”脑海“中,根据双眼获得的信息,把特征地标在三维地图中重建出来。
- 当自己在行走时,不断获取新的特征地标,并且校正头脑中的地图模型。
- 根据自己前一段时间行走获得的地表特征,确定自己的位置。
在此过程中,定位和建图是同时进行的。
VR中的SLAM
VR中的SLAM所依靠的传感器为IMU和Camera,通过传感器定位自己在空间中的哪个位置,我在哪里(移动位置x,y,z),我在看哪个方向(旋转角度),同时建图以确定周边的环境是什么样子的。
定位
在VR中,SLAM算法的输出就是6DOF(degree of freedom),即orientation + position。其实这个6DOF指的头6,在VR中还有手6DOF和物体6DOF的概念。
建图
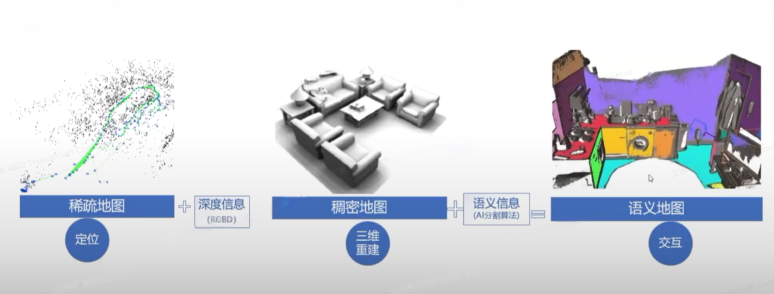
SLAM建立的地图可以分为三种:
- 稀疏地图
- 稠密地图
- 语义地图
SLAM Overview
硬件方案
6DOF的硬件方案:Inside-Out和Outside-In
| 方案 | Outside-in 外向内 | Inside-out 内向外 |
|---|---|---|
| 原理 | 基于标记,需要固定在外部的追踪设备 | 基于无标记,只需VR上的摄像头,使用SLAM算法 |
| 追踪精度 | 精度高,小于1mm | 精度略低 |
| 可移动范围 | 仅限于传感器监测范围 | 移动范围无限制 |
| 跟踪死角 | 正常几乎无死角 | 有跟踪死角 |
| 延迟 | 延迟相对少 | 有一定延迟 |
| 抗遮挡 | 易受遮挡影响 | 无遮挡问题 |
| 事前环境准备 | 需要 | 不需要 |
SLAM硬件:相机
| 单目相机 | 双目相机 | RGB-D相机 |
|---|---|---|
| 成本低 | 计算深度 | 主动测深度 |
| 距离不受限 | 距离不受限 | 重建效果好 |
| 尺度不确定性 | 配置复杂 | 测量范围小 |
| 初始化问题 | 计算量大 | 受日光和材质干扰 |
SLAM硬件: IMU
| 加速计 | 陀螺仪 | 磁力计 |
|---|---|---|
| 检测物体在载体坐标系统独立三轴的加速度信号,对单方向加速度积分即可得到方向速度 | 检测载体相对于导航坐标系的角速度信号 | 检测载体相对于地球磁场的东南西北方向信号 |
| ”我们又前进了几米“ | ”我们转了几圈“ | ”我们向西偏北方向“ |
SLAM硬件:相机和IMU互补
| 方案 | IMU | Camera |
|---|---|---|
| 优势 | 快速响应 不受成像质量影响 角速度普遍比较准确 |
不产生漂移 |
| 劣势 | 存在零偏 低精度IMU积分位姿发散 |
受图像遮挡、运动物体干扰 快速移动时易丢失 |
SLAM硬件:摆放要求
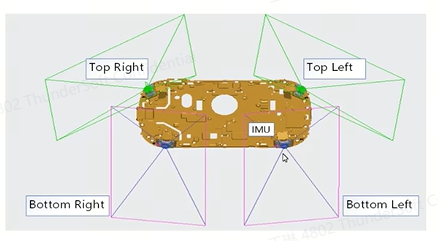
- 下面两个相机是主相机,需要下偏,确保充足的双目重叠
- 上面两个相机是辅相机,上偏,扩大跟踪FOV的同时兼顾前方盲区深度
- SLAM双目匹配,以及手柄、手势的主要活动区域,基本是以下面两个相机为主
- 四目相机和IMU之间要保证刚性连接,否则一旦发生位移,就需要重新标定
6DOF标定
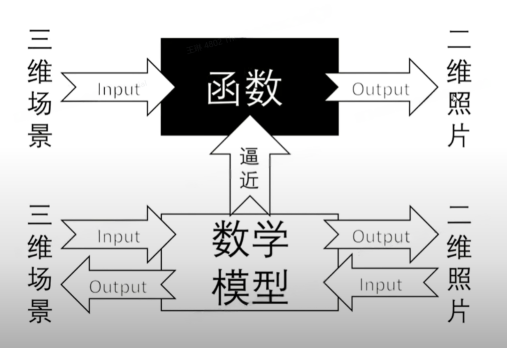
标定的目的
拿拍照来讲,拍照即为将三维的场景通过某种变换得到一张二维的照片,标定的目的就在于计算出一个数学模型,从而使得通过该数学模型,能够由二维的照片反推出三维的场景。
标定的好坏
重投影误差:真实三维空间点在图像平面上的投影(图像上的像素点)和重投影(用计算值得到的虚拟像素点)之间的差值。
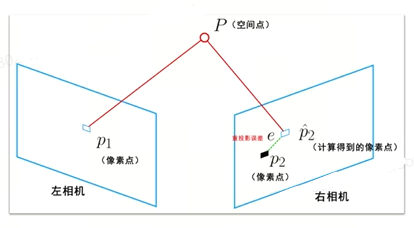
图中e即为计算得到的重投影误差值
SLAM算法模块
-
传感器模块:数据采集
-
视觉里程计模块:特征匹配
-
后端模块:消除视觉里程计累计误差
-
地图模块:构建三维地图
-
回环检测模块:空间积累误差消除
SLAM系统可以分为前台线程和后台线程,其中:
前台线程接收传感器数据,进行SLAM初始化和特征跟踪与位姿实时求解,并输出设备实时位姿和三维点云。
后台线程进行局部或全局优化,减少误差累积;进行场景回路检测,并支持场景重定位。
SLAM业务架构
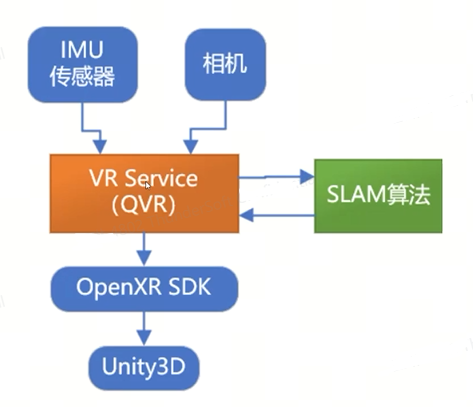
在当前主流的解决方案中,VR Service是比较重要的一个模块。比如高通的QVRService,QVR负责接收sensor的数据,并交由DSP上的SLAM算法做融合,生成的6DOF pose通过QVR传递给SDK/APP端。
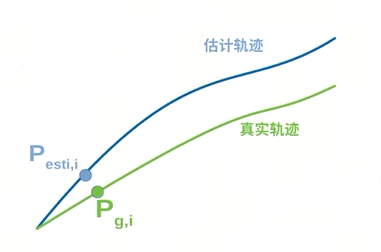
SLAM轨迹误差
绝对轨迹误差:真实轨迹点和估计轨迹点之间的差值
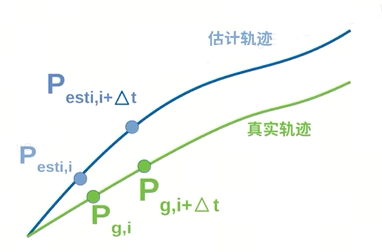
相对轨迹误差:位姿变化量的插值
SLAM性能指标
| 绝对位姿误差 | 位置最大误差 < 10cm,位置平均误差 < 4cm 最大角度误差 < 4 degree,平均角度误差 < 1 degree |
|---|---|
| 相对位姿误差 | 位置最大误差 < 10mm,位置平均误差 < 1mm 最大角度误差 < 0.5 degree,平均角度误差 < 0.1 degree |
| 漂移/draft | 无漂移,出现漂移,精度会非常差 |
| 抖动/jitter | 位置最大误差 < 3 mm,位置平均误差 < 0.5mm 最大角度误差 < 0.2 degree,平均角度误差 < 0.02 degree |
| 延迟 | 延迟 < 5ms |
| 重定位 | 重定位时间 < 1s,位置精度 < 1cm |
| 追踪范围 | 追踪范围 < 10m * 10m |
| 光照敏感性 | 明亮、灰暗、漆黑 |
| 纹理敏感性 | 高纹理、低纹理、无纹理 |
| 跟踪敏感性 | 位姿多变、快速距离切换、移动物体背景、传感器短暂失效 |
Video See Through
AR/VR显示技术可以分为OST和VST
- OST:光学透视,真实世界通过放置在用户眼前的半透明光学合成器看到的,同时光学合成器也被用来将计算机生成的图像反射到用户的眼睛里,从而将真实世界和虚拟世界结合起来。
- VST:视频透视,通过相机实时捕捉真实画面,再和虚拟世界该呈现的画面融合,最终呈现在显示屏幕上。
三维重建
常常被简写为3DR,全称为3D Reconstruction,其主要目的为实现更好的交互。
基本流程
稀疏点云重建—>稠密点云重建—>点云网格重建—>三维语义重建
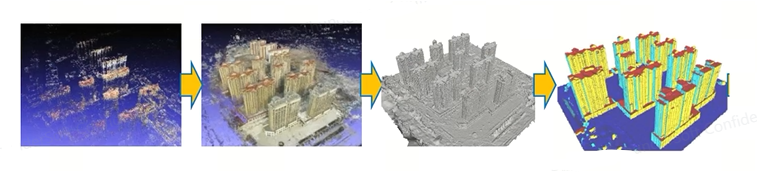
3DR的实现依赖于很多算法,如场景理解、语义分割、目标识别、位姿估计等
3DR框架
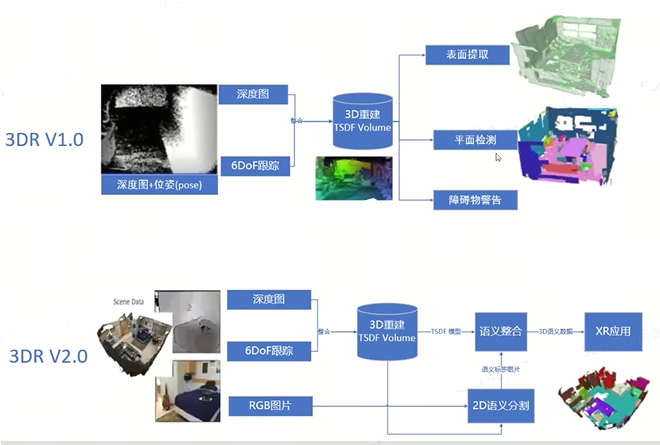
当前还处于1.0时代,有了平面检测,但是也只是平面的检测,而不是桌面的检测或地面的检测或具体的物体平面。
后记
囫囵的介绍了一下SLAM算法,但是很多模块并没有写的很详细。6DOF标定部分还有很多不曾提到的内容:6DOF标定过程、6DOF标定文件、畸变矫正等等等等,酝酿酝酿再补充。
总的来讲,行文断断续续,越断越爽,越续越差。😑